子供が風邪をひいて、昨日から学校を休ませていました。
今日はだいぶ元気になってくれたので、一緒にストロー工作をしました。
ひとつめは、ロボット(風)ハンド笑

ロボットと言う割にかなり原始的なつくりです。
そして実際動かしてみると、なんとも不思議で面白い動きをします。
この動きがツボだったのか、予想外に子供にウケました。
日本にとどまらず沢山のひとが似たようなもの作ってるようで、"ストロー ロボットハンド"、"straw robotic hand" あたりで検索すると沢山みつかります。
以下は我が家の工程の記録です。
【よういするもの】

●ストロー
●紐
●はさみ
●油性ペン
その他必要に応じて、セロテープや厚紙など。
①まず実際の手指を参考にして、ストローをだいたいの長さに切り揃えます。

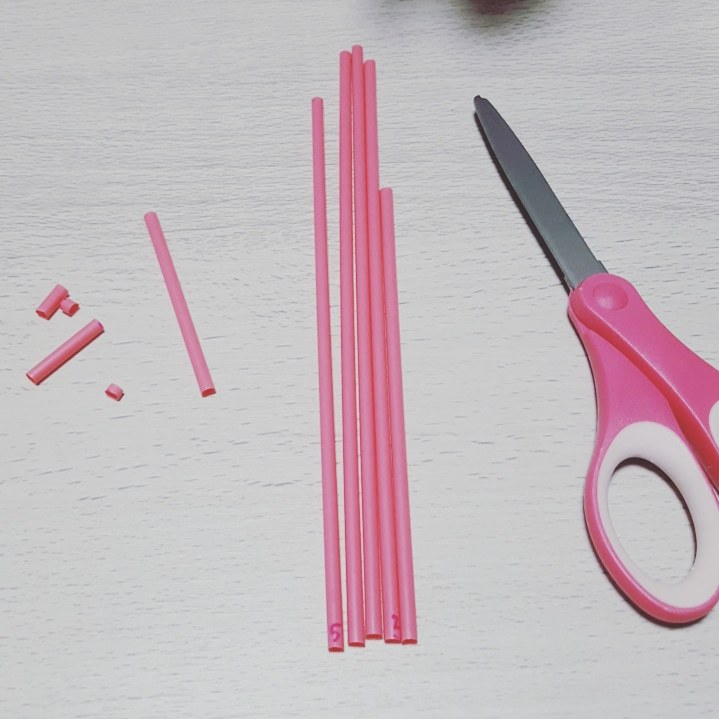
このとき、どれがどの指か数字などをストローに書き込んでおくと、あとでわかりやすいかも。
②指の関節部分に、油性ペンでマークをつける。

なんとなく、手首部分にもマークしちゃいましたがこれは不要でした。
③マークの部分でストローを折り曲げ、角をカット。


切りすぎるのが心配で、最初控えめにカットしてましたが、
指を曲げやすくするには、切り離さない程度にわりと大きく(半分くらい?)切ったほうがよかったみたいです。
④切り込みを内側にして関節に折り目をつけ直す。


小さな力でもしっかり曲がるよう、なるべくきつめに折り癖をつけます。
⑤ストローに紐を通し、先端で留める。


私は、先端に結び目をつくって抜けなくした上で、念のためテープで留めました。
さて、これで指一本分完成です!
紐をひっぱると、まるで生き物みたいに動きます。
(海外の作品ではこれ単体で芋虫つくってるひともいました。)
で、この指を5本分つくったら、貼り合わせて "手" の形にします。
手のひらにみたてた丈夫な紙などに固定してもよいかも。
紐をひっぱって、動きの悪い関節があったら切り込みを深くしたり、
指の向きを整えたりして、微調整が済んだら完成!!!
↓完成品を動かしてみたところです。軽いものなら掴めます。
子供とふたりで同時進行でつくったら、子供本人のは動きが悪いのが気に入らなかったらしくさっさと捨ててしまい、私が作った手でずーーーーっと色んなものを掴んで遊んでました。
特に飴を掴んでみたかったようなのですが、小さすぎて指からすり抜けちゃうんですよね。明らかに無理なのに何回もトライしてました。なぜそこまで飴にこだわる...
あ、もっと小さいサイズで作ってみようかなぁ。そしたら掴めるかも?
いやでもこのへんは....そろそろ自分で考えて作れるようになってほしいかな。
うまくいかないところを試行錯誤して完成させる楽しみを、いつかわかってくれるといいな。
順序が逆になりましたが、
ストローと輪ゴムでテンセグリティもつくりました。

思い出しながらでしたが、なんとか形になりました。
つぶしても元にもどるのが面白いみたいで、子供も真似して作ってました。
↓の動画のは、ストローの切り込みが大きすぎて輪ゴムが緩くかかっているため、潰すとちょっとイビツになってしまってますが...本来は手を離すと完全に元に戻ります。
6本のストロー骨が、輪ゴムの張力(=テンション)のみで支えられています。
このように、主な柱同士は直接繋がずに張力で一体化させる構造システムのことをテンセグリティと呼びます。構造材を極限までとっぱらった超軽量構造であり、建築の分野での応用が期待されていますが、今のところまだ研究中らしいです。
むかし、教えてもらいながらテンセグリティのタワーを作ったことがありました。どんなに高く積み上げても構造体として安定しており、かなり強く揺らしても崩れることはありませんが、
逆に小さな揺れにも非常に感化されやすいものでした。
これが一体何を意味するのか?タワーに応用できなくても免震の分野に活かせるのか?自分のなかでは謎のままです。どのように研究がすすんでいるのか、今後もっと知っていきたいです。
タグ:
[テンセグリティ] [工作] [動力]





